Y a-t-il une vie sans l’automate ? Comment construire un meilleur contrôleur intégré
Le PDG de Performance Motion Devices, Chuck Lewin, explique l’approche embarquée non-automate du contrôle des machines.
Alors que les API (contrôleurs logiques programmables) sont une norme de l’industrie, les demandes de données, de mémoire et de puissance de traitement s’intensifient. Bientôt, les automates pourraient ne plus être l’ordinateur industriel de référence.
Voici une description du processus de migration des contrôleurs de machines et de mécanismes d’une approche basée sur API vers une approche alternative. Cela signifie migrer vers un contrôleur embarqué, mais vous pouvez également migrer des automates vers un ordinateur industriel.
Ici, Chuck Lewin, PDG et fondateur de Performance Motion Devices, se concentre sur la migration des API vers une approche de commandes embarquées.
Design News : Quels sont les avantages de migrer d’une architecture de contrôle basée sur API vers une architecture de contrôle embarquée ?
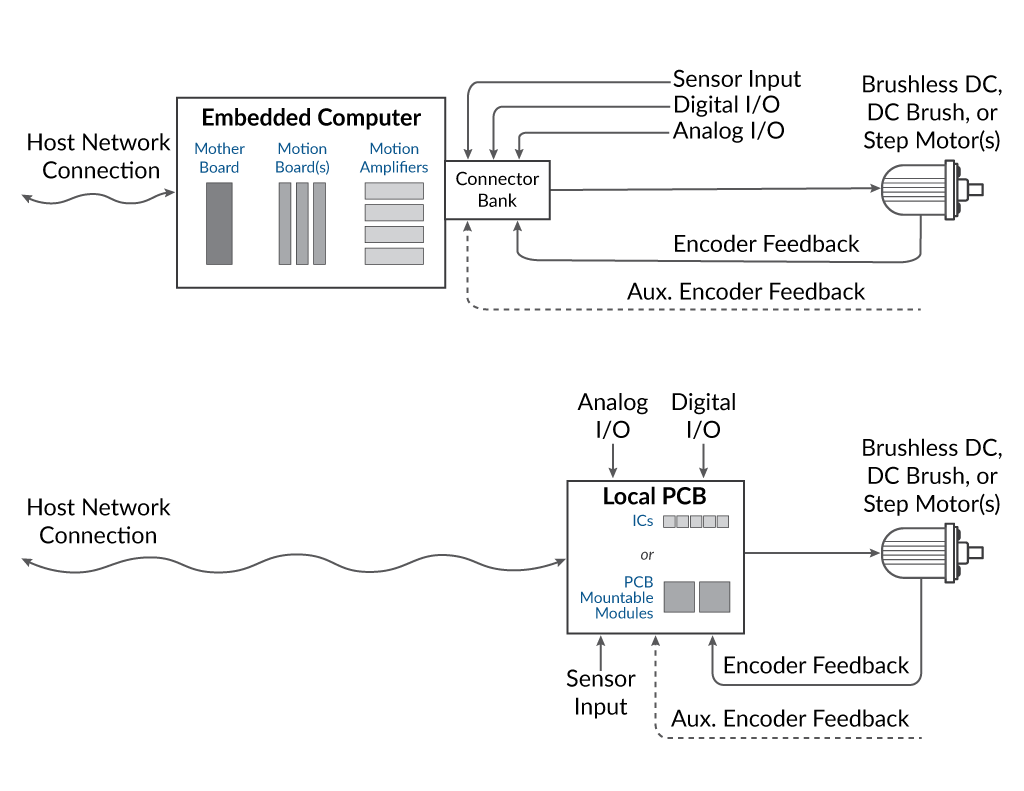
Chuck Lewin : Par architecture de contrôle embarquée. nous entendons un contrôleur qui est situé à l’intérieur de la machine qui sera contrôlé. Un tel contrôleur embarqué est presque toujours une carte de circuit imprimé (PCB), mais en théorie, cela pourrait être autre chose.
Par architecture de contrôle basée sur des automates, nous entendons des automates montés dans un boîtier situé quelque part à l’extérieur de la machine, reliés à la machine par des câbles.
Ce diagramme montre la différence entre les commandes à distance et locales, bien que les commandes dans la boîte ici se trouvent être un ordinateur industriel plutôt que des automates.
DN : Quels sont les avantages de se passer de l’automate ?
Chuck Lewin : Avec les définitions ci-dessus à l’esprit, en comparant l’approche basée sur un automate distant à une approche locale embarquée, les avantages sont les suivants :
– Simplification de l’installation et du fonctionnement de la machine. Si les commandes se trouvent à l’intérieur de la machine avec les commandes de l’opérateur également sur la machine, il n’y a pas lieu de s’inquiéter des faisceaux de câbles menant au boîtier de commande. La machine représente l’ensemble de l’unité, ce qui simplifie l’installation et prend moins de place au sol
–Performances de mouvement et données de capteur améliorées. Si les commandes sont à l’intérieur de la machine, cela signifie que tous les signaux de retour du codeur, les signaux d’entraînement du moteur, les connexions des capteurs, etc. parcourent une distance plus courte pour se rendre au contrôleur. Des distances de signal plus courtes signifient une qualité de signal plus élevée et moins d’EMI/bruit induits. Tout cela se traduit par un meilleur mouvement, des vitesses plus douces et une meilleure qualité des données des capteurs.
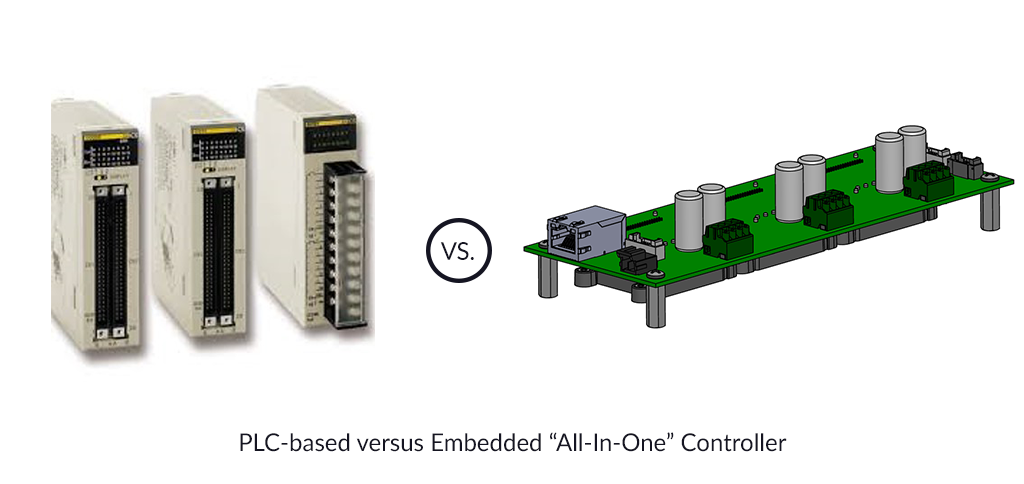
– Contrôleur plus petit et plus simple. Nous avons réalisé un exemple d’application d’un contrôleur de portique XYZ à trois axes pour comparer directement à quoi ressemblerait un contrôleur basé sur PLC pour un tel appareil par rapport à un contrôleur basé sur PCB. Quelques images sont ci-dessous. L’approche PCB prend environ dix fois moins de volume que les automates (ainsi que les rails DIN et le boîtier). Mais c’est aussi plus simple. L’approche PLC nécessite trois unités distinctes, chacune câblée à des câbles qui sortent ensuite du boîtier et vont à la machine. Beaucoup de pièces émouvantes pour ainsi dire. Le PCB du contrôleur a toutes les connexions allant d’un PCB compact directement aux moteurs, capteurs, encodeurs, etc…



![Solution de caméras séparées en prévision[5].png](https://www.graph-id.fr/wp-content/uploads/2021/08/Comment-les-cameras-stereoscopiques-peuvent-completer-le-lidar-pour-de-768x399.png)