Un robot rapide de la taille d’un insecte peut se déplacer comme un guépard
Les chercheurs de l’UC Berkeley renforcent l’agilité des machines avec des repose-pieds électrostatiques pour permettre des virages rapides, des mouvements plus contrôlés et une plus grande stabilité globale.
Les chercheurs ont combiné l’agilité d’un guépard avec la capacité des insectes à escalader les murs et les terrains complexes dans leur conception d’un robot de la taille d’un insecte qui peuvent se déplacer rapidement et avec assurance pour une utilisation potentielle dans des scénarios de catastrophe.
Les derniers travaux d’une équipe de l’Université de Californie à Berkeley dirigé par Liwei Lin, professeur de génie mécanique, s’appuie sur une conception développé en 2019 créer un robot de la taille d’un cafard qui peut se déplacer sur une surface plane à une vitesse de 20 longueurs de corps par seconde.
Cette vitesse, l’équivalent de 1,5 mille à l’heure, est presque aussi rapide qu’un véritable cafard peut se déplacer. À l’époque, le robot était la vitesse la plus rapide en termes de taille pour n’importe quel robot de ce type.
Maintenant, les chercheurs ont ajouté deux coussinets électrostatiques au robot, ce qui lui donne plus d’amplitude de mouvement et le rend plus facile à contrôler, ont-ils déclaré.
Les coussinets fonctionnent de la même manière que les appendices collants des insectes réels pour permettre au robot de coller plus fermement à une surface. L’utilisation d’une adhérence électrostatique – c’est-à-dire qu’une tension appliquée à l’un d’eux augmente la force électrostatique entre le coussinet et la surface – permet aux coussinets de coller tandis que le reste du robot peut pivoter sur le pied, ont déclaré les chercheurs.
Plus de stabilité et de contrôle
Donner au robot cette stabilité permet un contrôle plus global sur le mouvement du robot, a déclaré Lin. Alors que la machine d’origine – fabriquée à partir d’un matériau en couches minces qui se plie et se contracte lorsqu’une tension électrique est appliquée – « pouvait se déplacer très, très rapidement », les chercheurs ne pouvaient pas contrôler la direction dans laquelle elle se déplaçait, a-t-il déclaré. En fait, le plus souvent, il se déplacerait au hasard, a-t-il déclaré.
« S’il y avait une légère différence dans le processus de fabrication – si le robot n’était pas symétrique – il virerait d’un côté », a déclaré Lin dans un communiqué de presse.
La dernière itération de conception améliore considérablement cet aspect, a-t-il déclaré. « Dans ce travail, l’innovation majeure a été d’ajouter ces patins qui lui permettent de faire des virages très, très rapides », a déclaré Lin dans un communiqué de presse.
En effet, les deux repose-pieds donnent aux opérateurs un contrôle total sur la trajectoire du robot et lui permettent d’effectuer des virages avec une accélération centripète qui dépasse celle de la plupart des insectes vivants, selon les chercheurs.
Les chercheurs ont publié une étude sur leurs dernières recherches en Robotique scientifique.
Des performances prometteuses
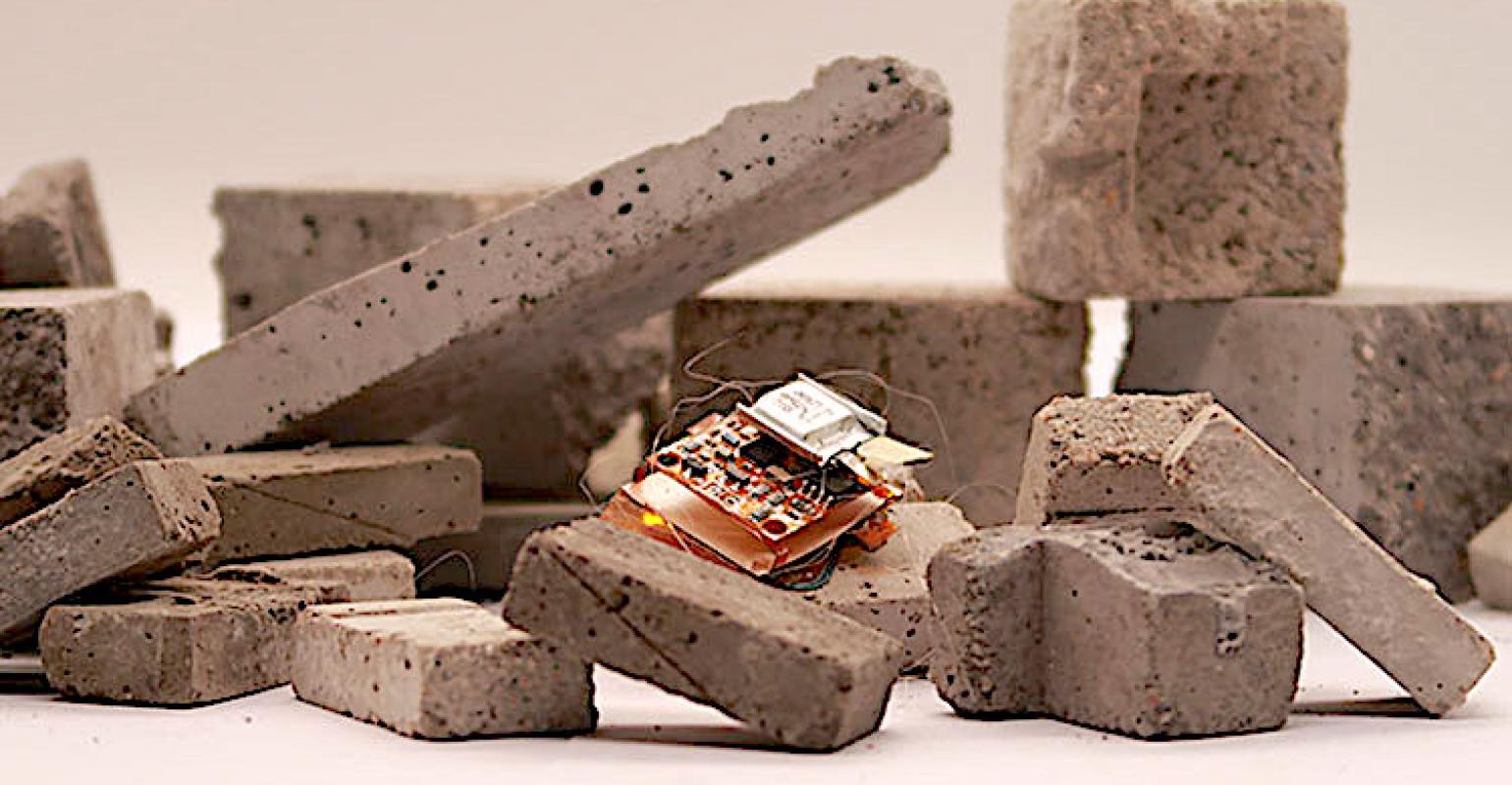
L’équipe a démontré la nouvelle portée et la capacité de mouvement du robot avec un faux scénario de catastrophe de la taille d’un insecte. Ils ont filmé le robot naviguant adroitement dans des labyrinthes de Lego tout en portant un petit capteur de gaz et en faisant une embardée pour éviter la chute de débris.
La plupart de ces compétences ont été démontrées alors que le robot était « attaché », les opérateurs utilisant un petit fil pour le contrôler. Cependant, le robot a également montré qu’il peut fonctionner sur batterie sans fil jusqu’à 19 minutes et parcourir 31 mètres tout en transportant un capteur de gaz, ce qui est inhabituel pour un robot de cette taille, a déclaré Lin.
« L’un des plus grands défis aujourd’hui est de fabriquer des robots à plus petite échelle qui maintiennent la puissance et le contrôle de robots plus gros », a-t-il reconnu dans un communiqué de presse. « Quand vous essayez de tout réduire à une échelle de plus en plus petite, le poids de [power-source] les éléments deviennent difficiles à transporter pour le robot et le robot se déplace généralement très lentement. Notre robot est très rapide, assez puissant et nécessite très peu d’énergie, ce qui lui permet de transporter des capteurs et de l’électronique tout en transportant une batterie.
Le robot a également montré une durabilité lors d’expériences, prouvant qu’il pouvait survivre même après avoir été piétiné par un humain de 120 livres, ont déclaré les chercheurs.
Lin et l’équipe envisagent que les robots pourraient être utilisés pour des scénarios réels similaires à celui qui a été testé, comme dans une fuite de gaz, ou pour la recherche et le sauvetage lors de catastrophes, ont déclaré les chercheurs.