Création d’une tête de robot animatronique (Partie 3)
Je suis ravi de vous dire que j’ai maintenant la tête entre les mains.

Comme toujours, les choses s’emballent ici dans le Pleasure Dome (mon bureau). Dans le cas de mon projet de tête de robot animatronique, par exemple, je suis ravi de vous dire que j’ai maintenant ma tête entre les mains, et ce n’est pas quelque chose que vous vous attendez à vous entendre dire tous les jours.
Au cas où tout cela serait nouveau pour vous, et juste pour vous assurer que nous dansons tous les claquettes sur le même rythme de tambour (je sais de quoi je parle, car mon cher vieux père était danseur sur la scène de la salle de variétés avant à la Seconde Guerre mondiale), résumons brièvement l’état des lieux jusqu’à présent.
Tout a commencé lorsque mon copain Steve Manley, qui est basé au Royaume-Uni, et votre humble serviteur, qui accroche son chapeau aux États-Unis, ont décidé de construire des présentoirs que nous avons surnommés Les affichages impressionnants de Steve et Max.
Comme indiqué dans la partie 1 de cette mini-méga-série, j’ai initialement utilisé deux de ces écrans pour implémenter les «yeux» sur une pseudo tête de robot. J’étais assez satisfait de la façon dont cela avait l’air jusqu’à ce qu’un ami suggère que les choses seraient plus intéressantes si les yeux pouvaient se déplacer d’un côté à l’autre et s’incliner de haut en bas. Et le niveau d’intérêt augmenterait encore plus si la tête entière pouvait également effectuer un panoramique et une inclinaison.=
Toujours dans la partie 1, nous avons présenté le joystick JH-D400X-R4. Ces petits coquins, qui sont disponibles sur eBay pour environ 16 $, prétendent être des appareils à 4 axes. En réalité, l’un de ces « axes » est un bouton poussoir sur le dessus, tandis que les trois autres axes, chacun pilotant un potentiomètre de 10 kΩ, répondent à différents types de mouvement : pousser à gauche et à droite, pousser vers l’avant et tirer vers l’arrière, et tordre. /rotation dans le sens des aiguilles d’une montre et dans le sens inverse des aiguilles d’une montre.
Un scénario d’utilisation consiste à utiliser deux de ces joysticks pour contrôler la tête à la main, si vous voyez ce que je veux dire. Par exemple, nous pourrions utiliser l’un des joysticks pour contrôler les mouvements associés à la tête, tandis que l’autre joystick contrôlait les mouvements des yeux. Dans ce cas, les deux yeux bougeraient de manière identique. Alternativement, avec une simple pression sur un bouton-poussoir au-dessus de l’un des joysticks, nous pourrions laisser la tête dans sa position actuelle et utiliser les joysticks pour contrôler chaque œil indépendamment.
La raison pour laquelle j’ai dit « un scénario d’utilisation » dans le paragraphe précédent est que je prévois également d’équiper ma tête animatronique d’un tas de capteurs. Dans la plénitude des temps, je veux qu’il soit capable de répondre au son et au mouvement ; aussi, être capable de reconnaître et de répondre aux visages, et d’identifier et de répondre aux expressions faciales et aux gestes de la main, mais tout cela est dans le futur.
Dans la partie 2, j’ai expliqué comment j’ai commencé à construire mon prototype en achetant deux mécanismes de panoramique et d’inclinaison pré-assemblés et servocommandés d’Adafruit. Pendant ce temps, Steve a lancé son logiciel de conception 3D et son imprimante 3D et a créé une implémentation comme je n’en avais jamais vue auparavant, comme le montre cette vidéo.
J’ai presque honte de vous montrer la comparaison entre nos deux solutions, mais étant donné que Steve a fait une grande partie du travail, je pense que ce n’est que justice. L’image ci-dessous reflète les premiers jours de mon prototype.
Les premières étapes de mon prototype.
Les deux plates-formes grises sont en bois peint à la bombe. La plate-forme à l’arrière-plan contient les deux mécanismes de servos panoramiques et inclinables que j’allais utiliser pour contrôler mes yeux. La plate-forme au premier plan porte les deux joysticks et une petite carte avec trois interrupteurs à bascule et un circuit intégré anti-rebond de commutateur LS19 à 6 canaux de LogiSwitch (voir aussi Comment empêcher un interrupteur inversé de rebondir comme une balle de golf tombée du toit).
Le bloc de bois au milieu est un relais temporaire pour la distribution de l’alimentation, une unité de microcontrôleur (MCU) Teensy 3.6 et l’une des cartes de pilote de servo d’Adafruit, qui utilise un bus I2C pour vous permettre de contrôler jusqu’à 16 servos.
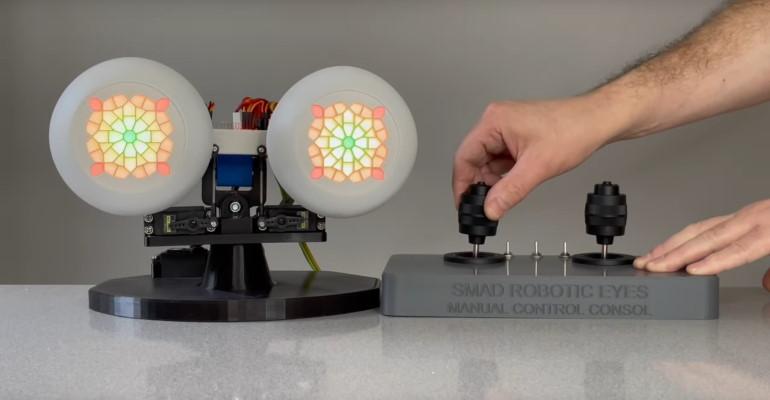
Pour être honnête, j’étais assez satisfait de la façon dont les choses progressaient jusqu’à ce que je voie ce que Steve avait fait. Commençons par sa console de contrôle, le boîtier pour lequel il a créé à l’aide de son imprimante 3D.
La console de contrôle de Steve.
Comme toujours, je suis émerveillé par la qualité des créations de Steve et la propreté de son câblage. Le grand tableau rouge est une unité de contrôle à usage général que nous avons créée à l’origine pour être utilisée avec nos écrans victoriens à 10 caractères et 21 segments. On peut également voir le dessous des deux joysticks, entre lesquels se trouvent deux cartes multiplexeurs analogiques I2C qui servent à lire l’état des potentiomètres (nous reviendrons sur ces cartes dans une prochaine chronique).
Mais le véritable chef-d’œuvre est la tête animatronique créée par Steve. Comme le montre cette vidéo, cette beauté corporelle possède quatre petits servos (deux pour chaque œil) et trois servos plus grands pour contrôler la tête principale.
Dès que j’ai vu cela en action, j’ai réalisé que c’était bien au-delà de tout ce que je pouvais créer moi-même dans le temps limité dont je disposais. Heureusement, Steve est un prince parmi les hommes, car une fois que tout a fonctionné, il a très gentiment créé une deuxième unité, qu’il a expédiée à votre humble narrateur. Ce petit coquin (la tête animatronique, pas Steve) est arrivé il y a quelques jours au moment où j’écris ces mots, ce qui explique pourquoi j’ai commencé cette chronique en déclarant que j’avais ma tête entre les mains, pour ainsi dire.
Bien entendu, nous n’en sommes encore qu’aux prémices de ce projet. Vient maintenant la partie où nous commençons à jouer avec le logiciel, mais ce sera une histoire pour une future chronique. En attendant, comme toujours, j’attends vos commentaires, questions et suggestions.