Création d’une tête de robot animatronique (partie 2)
Selon vous, combien de façons existe-t-il d’équiper les yeux de votre robot d’une fonctionnalité de panoramique et d’inclinaison ?

Je ne peux pas vous dire à quelle vitesse les choses bougent en ce moment. Dans ma précédente chronique sur le thème de la création d’une tête de robot animatronique, j’ai expliqué comment ce projet a vu le jour. Tout d’abord, mon pote Steve Manley (qui est basé au Royaume-Uni) et votre humble narrateur (qui est basé aux États-Unis) ont décidé de créer des extravagances LED tricolores que nous avons modestement surnommées Steve et Max’s Awesome Displays (SMAD).
Dans mon cas, j’ai utilisé deux SMAD pour former les yeux d’une « pseudo » tête de robot qui ne pouvait en aucun cas bouger. Cela ne veut pas dire que ce n’était pas génial en soi, mais quelqu’un a suggéré que les choses seraient rendues plus intéressantes si j’ajoutais du mouvement dans le mélange. La suggestion originale était que chacun des yeux puisse faire un panoramique (se balancer d’un côté à l’autre) et s’incliner (se pencher en avant et en arrière) sur une base individuelle.
J’ai discuté avec Steve à ce sujet, et il a convenu que ce serait amusant de faire quelque chose dans ce sens. Steve et moi avons tous deux investi dans une paire de joysticks à 4 axes dont j’ai parlé dans ma chronique précédente. J’ai monté mes joysticks sur une petite plate-forme en bois, tandis que Steve est passé à l’action et a imprimé en 3D une console astucieuse qui, en plus des joysticks, abritait également la majorité de son électronique (microprocesseur, multiplexeurs analogiques, etc.).
En ce qui concerne la fonctionnalité de panoramique et d’inclinaison, je me suis rendu sur le site Web d’Adafruit et j’ai acheté une paire de mécanismes de panoramique et d’inclinaison pré-assemblés, chacun étant équipé de deux micro-servos.
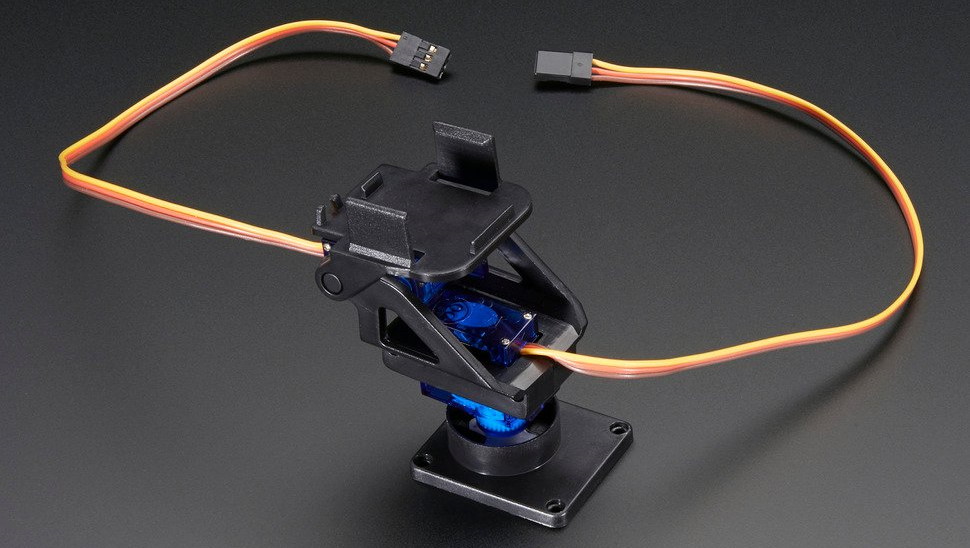
Mécanisme panoramique et d’inclinaison avec deux micro-servos.
Soit dit en passant, la nomenclature « panoramique » et « inclinaison » que j’utilise provient des têtes panoramiques et inclinables sur lesquelles sont montées les caméras de cinéma et de télévision. Ces dispositifs permettent de faire pivoter la caméra dans un plan horizontal (pan) ou dans un plan vertical (tilt).
Maintenant, c’est là que les choses commencent à devenir intéressantes parce que bien que Steve et moi ayons discuté de ce que nous voulions faire, nous n’avions pas eu de séance de remue-méninges sur la façon de le faire. Lorsque nous examinons attentivement l’image ci-dessus, nous voyons que la fonction panoramique – le sous-ensemble servocommandé en bas – est mécaniquement distincte de la fonction d’inclinaison – le sous-ensemble servocommandé en haut.
Pour être honnête, en ce qui concerne les mécanismes de panoramique et d’inclinaison à servocommande, c’est la seule façon dont j’ai jamais vu ces choses mises en œuvre. En comparaison, Steve n’était pas familier avec la façon dont les choses « devraient être faites », alors il est parti et a créé quelque chose de complètement différent.
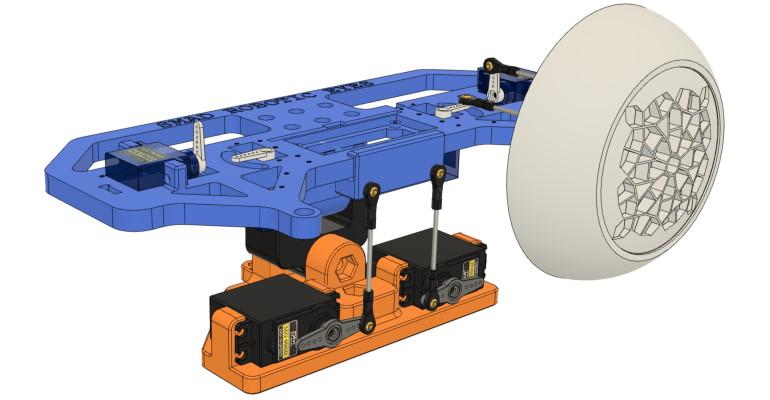
Comme point de départ, regardez l’image ci-dessous. Bien que cela ne soit pas lié à 100% à notre discussion ici, commençons par l’assemblage orange imprimé en 3D en bas. Cela contient deux servos qui sont connectés à la plate-forme bleue imprimée en 3D ci-dessus. En utilisant ces deux servos, si les deux sont entraînés vers le haut ou vers le bas, ils inclineront l’avant de la plate-forme bleue vers le haut et vers le bas, respectivement. Alternativement, si l’un de ces servos monte et que l’autre descend, la plate-forme bleue se penchera d’un côté (comme si vous penchiez la tête en l’inclinant de manière à ce que l’une de vos oreilles se rapproche de votre épaule).
Ce qui n’est pas montré ici, c’est que l’assemblage orange reposera sur le dessus du cou du robot, auquel il sera attaché via un autre servo qui fera basculer l’assemblage orange (et la plate-forme bleue assise dessus) de côté à côté.
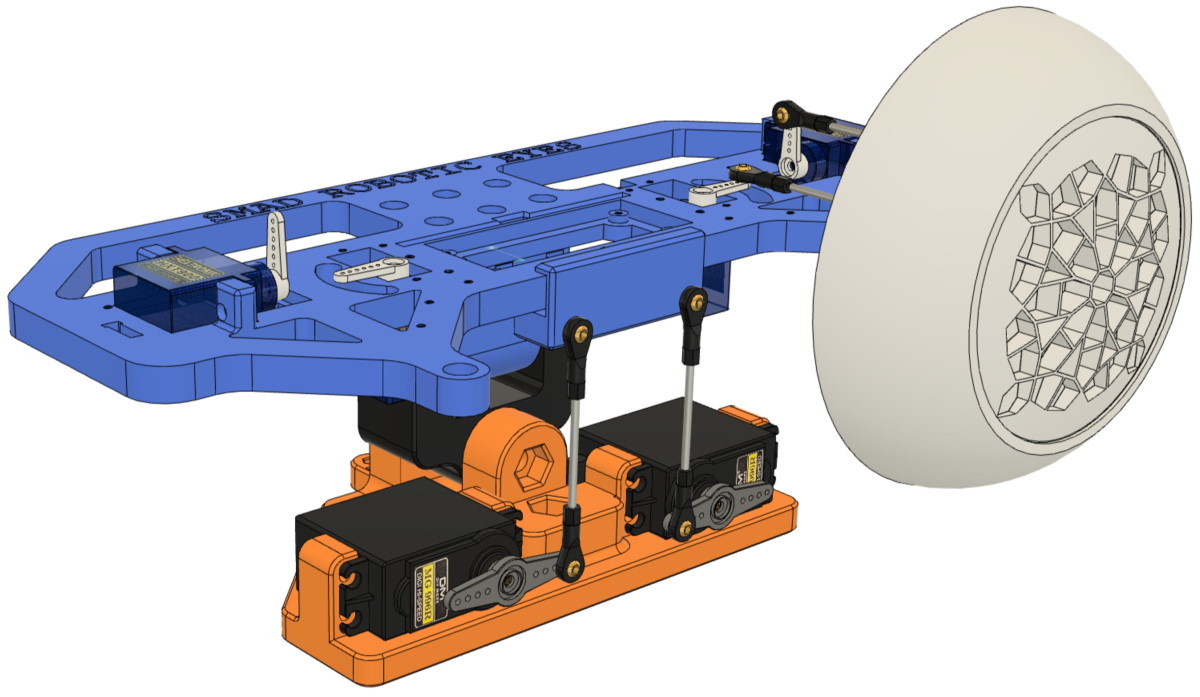
Tête de robot avec un SMAD attaché.
Revenant à la plate-forme bleue, c’est la partie qui porte les quatre servos qui contrôlent les yeux – deux par SMAD. Seul le SMAD gauche de la tête, qui apparaît à droite de cette image, est représenté ici. Si vous comparez cela à mes mécanismes de panoramique et d’inclinaison, remarquez-vous quelque chose d’inhabituel lorsque vous regardez les deux servos connectés au SMAD ? C’est vrai, contrairement à l’arrangement typique, nous n’en avons pas un assis au-dessus de l’autre.
Lorsque Steve a essayé d’expliquer comment cela allait fonctionner, je ne pouvais pas comprendre comment un servo pouvait contrôler le panoramique sans affecter la tuile tandis que, en même temps, l’autre servo pouvait contrôler l’inclinaison sans affecter le panoramique. Finalement, Steve a créé la vidéo d’animation ci-dessous.
OH MON DIEU! C’est génial. Pour être honnête, je n’ai jamais rien vu de semblable à ce mécanisme auparavant. De plus, j’ai montré cette vidéo à un certain nombre de mes amis ingénieurs, et c’est nouveau pour eux aussi. Tout ce que je peux dire, c’est « colorez-moi impressionné! »
Au moment d’écrire ces lignes, Steve a tout en place et fonctionne. En fait, il a créé une deuxième tête pour votre serviteur. Mieux encore, au moment où j’écris ces mots, ma tête de robot vole à travers l’océan Atlantique. J’ai hâte de me prendre la tête entre les mains (et ce n’est pas souvent qu’on s’entend dire ça). Je reviendrai, bien entendu, dans une prochaine chronique. En attendant, comme toujours, j’ai hâte de recevoir vos commentaires, questions et suggestions.