Compte tenu de la valeur d’un pont SPI-LIN dans les voitures
Ouvrir de nouveaux horizons dans les solutions maîtres LIN automobiles avec une nouvelle étape dans l’intégration et la conception des calculateurs.

Les systèmes de bus automobiles du réseau d’interconnexion local (LIN) sont principalement placés dans le domaine de la carrosserie et nous constatons une augmentation constante du nombre de nœuds dans la voiture. Cet article présente le concept d’un pont interface périphérique série (SPI) vers LIN multiple qui changera considérablement la façon dont les systèmes de bus automobiles LIN seront connectés au microcontrôleur des unités de commande électroniques (ECU) de la voiture.
Le concept de pont SPI à LIN permet à l’unité de microcontrôleur hôte (MCU) d’être entièrement adaptée aux exigences de performance de l’application. En plus de réduire considérablement la nomenclature et la consommation d’espace sur la carte, ce concept améliore également considérablement la flexibilité et l’évolutivité des architectures de canaux maîtres multi-LIN.
Nous concluons avec un exemple d’application maître LIN multicanal avec pont SPI-to-LIN, basée sur le SJA1124 de NXP. Le SJA1124 est un émetteur-récepteur LIN incorporant quatre canaux maîtres LIN, chacun avec un contrôleur maître intégré et une terminaison maître. En intégrant la terminaison maître avec le contrôleur maître, la nomenclature et l’espace carte sont clairement réduits.
Sommaire
introduction
De plus en plus d’applications ont plusieurs canaux maîtres LIN. De plus, le nombre de canaux LIN par application augmente également, alors que l’espace disponible pour ces applications diminue généralement.
Dans cet article, les solutions basées sur des ponts SPI-à-LIN pour les applications LIN multicanaux sont décrites. Il explique comment l’espace carte et la nomenclature sont réduits et comment l’évolutivité et la flexibilité de l’architecture d’application et de la variété de microcontrôleurs sont améliorées.
Limites du MCU
Fonctionnalités LIN sur puce
Il existe une large gamme de fonctionnalités MCU intégrées prenant en charge les applications LIN, allant d’un simple UART à un contrôleur LIN complet. Le nombre de canaux LIN intégrés varie également de quelques à plusieurs, mais dépend généralement de la plate-forme de performances MCU.
Nombre de broches
Pour chaque canal LIN, au moins deux broches sont nécessaires, qui sont les broches TXD et RXD. De plus, une ou plusieurs broches de commande de mode peuvent être nécessaires pour faire passer le mode émetteur-récepteur LIN du mode basse consommation au mode normal et vice versa.
Ainsi, pour les applications avec plusieurs canaux maîtres LIN, le nombre de broches nécessaires s’accumule avec au moins un facteur de deux. Par exemple, pour 8 canaux LIN, plus de 16 broches sont nécessaires. L’exemple de la figure 1 illustre le nombre de broches MCU nécessaire pour deux émetteurs-récepteurs LIN quadruples, connectés de manière traditionnelle avec des paires de TXD et RXD par canal LIN.
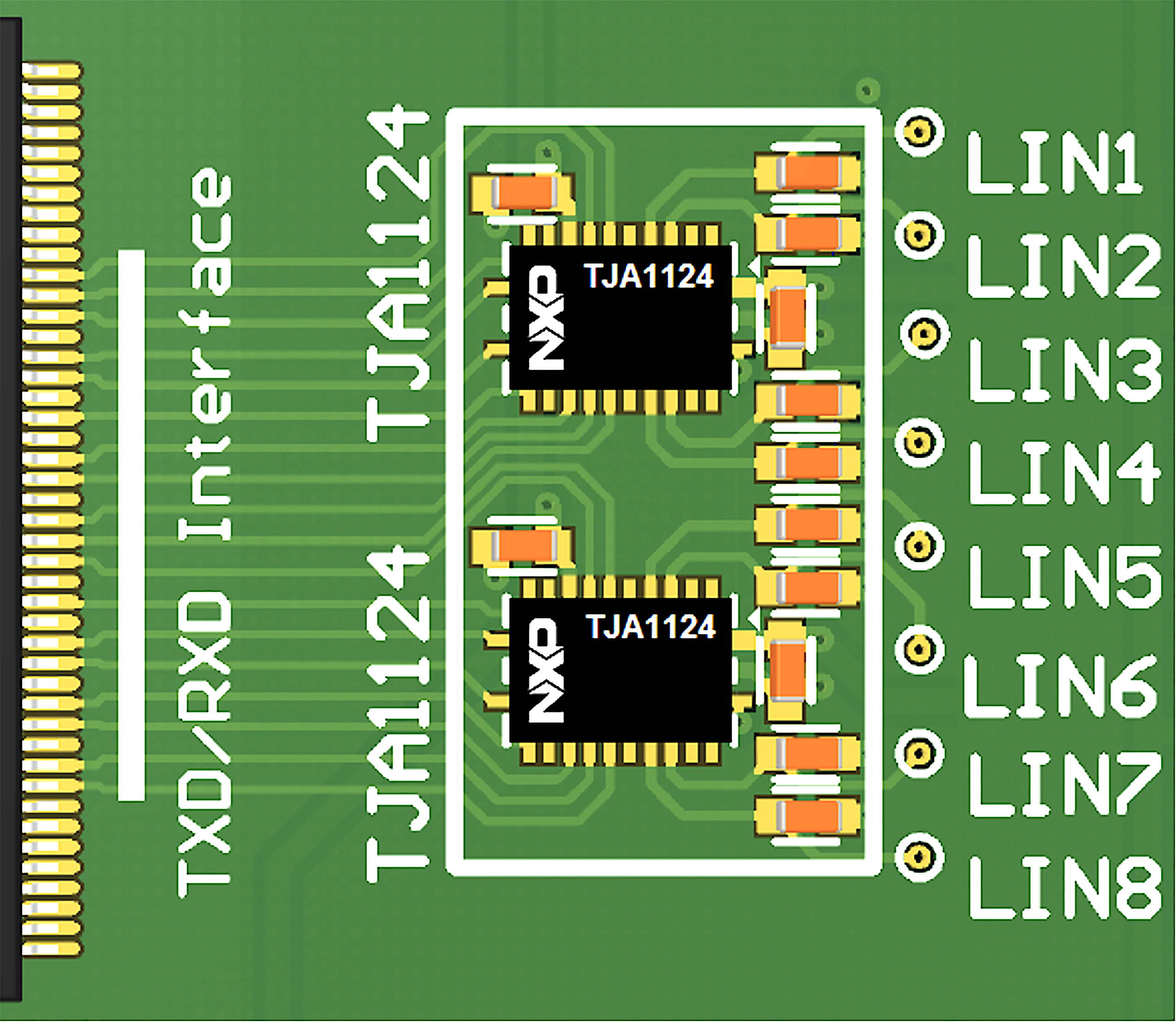
18 broches MCU pour 8 canaux maîtres LIN.
Si le nombre de broches MCU est déjà critique, le nombre élevé de broches requises pour plusieurs canaux maîtres LIN peut forcer la sélection de la prochaine variante de famille MCU plus élevée et plus chère avec plus de broches, si disponible – ce qui n’est pas toujours le cas. Cela entraîne une augmentation significative de la nomenclature et, par conséquent, des coûts.
Nombre de contrôleurs UART/LIN sur puce
Dans le cadre des périphériques sur puce, le nombre disponible de contrôleurs UART/LIN intégrés dépend généralement de la classe de performances de la famille MCU, c’est-à-dire que plus la classe de performances est élevée, plus de canaux LIN sont intégrés. Le choix d’un microcontrôleur haut de gamme/à nombre de broches élevé (plus grande empreinte) peut être nécessaire, bien que les performances supérieures du microcontrôleur ne soient pas nécessaires du point de vue de l’application.
De plus, plus le nombre requis de contrôleurs UART/LIN intégrés est élevé, plus la gamme de familles de microcontrôleurs disponibles est réduite. Dans le pire des cas, aucune variante de MCU avec suffisamment de contrôleurs UART/LIN n’est disponible dans la famille de MCU préférée. Potentiellement, même un passage à une nouvelle architecture MCU pourrait être inévitable. Cela signifie essentiellement que le nombre de canaux LIN détermine le choix du MCU, au lieu des performances requises.
Flexibilité et évolutivité via l’interface SPI
Et si le contrôleur LIN se déplaçait dans l’émetteur-récepteur LIN ? Avec l’intégration d’un contrôleur LIN dans un dispositif émetteur-récepteur LIN, les signaux TXD et RXD entre le MCU et l’émetteur-récepteur LIN sont éliminés. Au lieu de cela, une interface MCU standard pour les périphériques peut être utilisée, telle que l’interface périphérique série (SPI).
Un tel dispositif LIN, avec d’un côté un SPI et de l’autre une interface de bus LIN, est appelé un « pont SPI-to-LIN ».
Sélection MCU découplée du nombre de canaux LIN
Le déplacement du contrôleur LIN du MCU vers l’émetteur-récepteur LIN découple la sélection du MCU du nombre de canaux LIN. Le nombre de contrôleurs UART/LIN intégrés dans le MCU n’est plus un facteur pertinent/limitant. En fait, aucun contrôleur UART/LIN intégré n’est nécessaire. Pour réaliser la communication LIN, le MCU doit simplement disposer d’une fonction SPI standard.
Comme un pont SPI-LIN découple la sélection MCU du nombre de canaux LIN, les performances MCU requises deviennent le principal critère de sélection, plutôt que le nombre de canaux de communication LIN qui doivent être gérés. Ainsi, cela élargit considérablement la gamme de microcontrôleurs appropriés et disponibles.
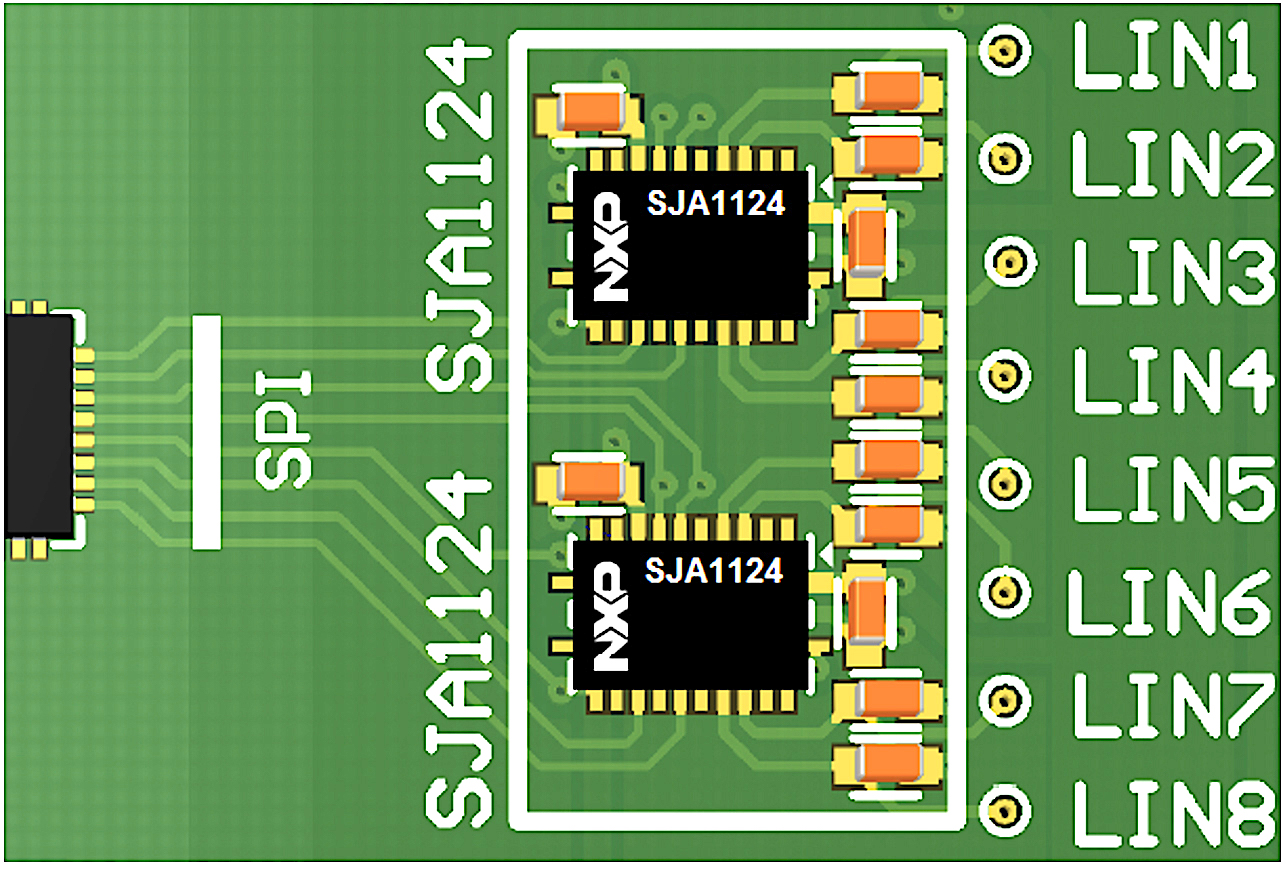
8 broches MCU pour 8 canaux maîtres LIN basés sur un pont SPI-à-QuadLIN
Avec SPI, le nombre requis de broches d’interface MCU devient presque indépendant du nombre de canaux LIN. Cela rapporte le plus pour un nombre plus élevé de canaux LIN. Par exemple, un pont SPI-to-LIN avec quatre canaux LIN intégrés nécessiterait 1 broche de sélection de puce MCU supplémentaire pour passer de quatre à huit canaux maîtres LIN. La figure 2 illustre un exemple de nombre de broches MCU avec deux ponts SPI vers QuadLIN.
En fonction de l’empreinte de calcul de l’application, cela ouvre la voie à l’utilisation de microcontrôleurs plus petits et grand public à faible nombre de broches.
De plus, un pont SPI-to-LIN permet la mise à niveau des applications héritées avec des canaux LIN supplémentaires, bien que le MCU appliqué ne fournisse pas les contrôleurs UART/LIN supplémentaires requis.
Pilote logiciel LIN indépendant du matériel
En raison du déplacement du contrôleur LIN hors du MCU, le pilote AUTOSAR LIN devient indépendant du matériel MCU. Comme le pilote d’émetteur-récepteur LIN AUTOSAR, le pilote LIN dépend désormais uniquement de la mise en œuvre du pont SPI à LIN, en utilisant le matériel SPI standard d’un microcontrôleur. Pour cette raison, le pilote LIN d’un pont SPI vers LIN fait partie de l’abstraction du matériel de communication AUTOSAR.

Pont SPI-à-LIN Pilote LIN AUTOSAR dans le cadre de l’abstraction du matériel de communication.
Comme illustré à la Figure 3, le pilote d’émetteur-récepteur LIN et le pilote LIN sont situés entre l’interface AUTOSAR LIN et le gestionnaire/pilote SPI. En tant que tel, il peut faire partie du logiciel AUTOSAR ECU Abstraction Layer d’un fournisseur de logiciels ou d’un module complémentaire aux packages AUTOSAR Microcontroller Abstraction Layer (MCAL) d’un fournisseur de microcontrôleurs. Cela permet une réutilisation rapide du pilote logiciel LIN pour différentes implémentations de MCU.
Les performances SPI sont essentielles
L’utilisation d’un SPI comme interface MCU pour plusieurs canaux LIN met par conséquent l’accent sur les performances SPI, car il devient le goulot d’étranglement pour le flux de données LIN. Le temps d’exécution SPI est le facteur limitant pour le débit de données. Par conséquent, cela limite également le nombre maximum de canaux LIN, qui peuvent être correctement desservis par un SPI.
Le temps d’exécution SPI dépend du matériel choisi (MCU et pont SPI-to-LIN) et de l’implémentation logicielle (gestionnaire/pilote SPI). En raison de la diversité des implémentations MCU SPI (optimisées pour la taille de la matrice ou la faible puissance ou vitesse, etc.) et les implémentations du pilote logiciel SPI (optimisées pour la taille ou la vitesse du code, etc.), un nombre maximal générique de canaux LIN utilisables par SPI est difficile à donner. En règle générale, un SPI doit pouvoir desservir au moins 8 canaux LIN.
L’espace conseil de plus en plus sous pression
Une terminaison maître LIN conventionnelle est composée de composants discrets, tels que 1 ou 2 résistances de rappel et 1 diode. Cela signifie que max. 3 parties discrètes par canal maître LIN sont nécessaires, comme le montre la figure 4.
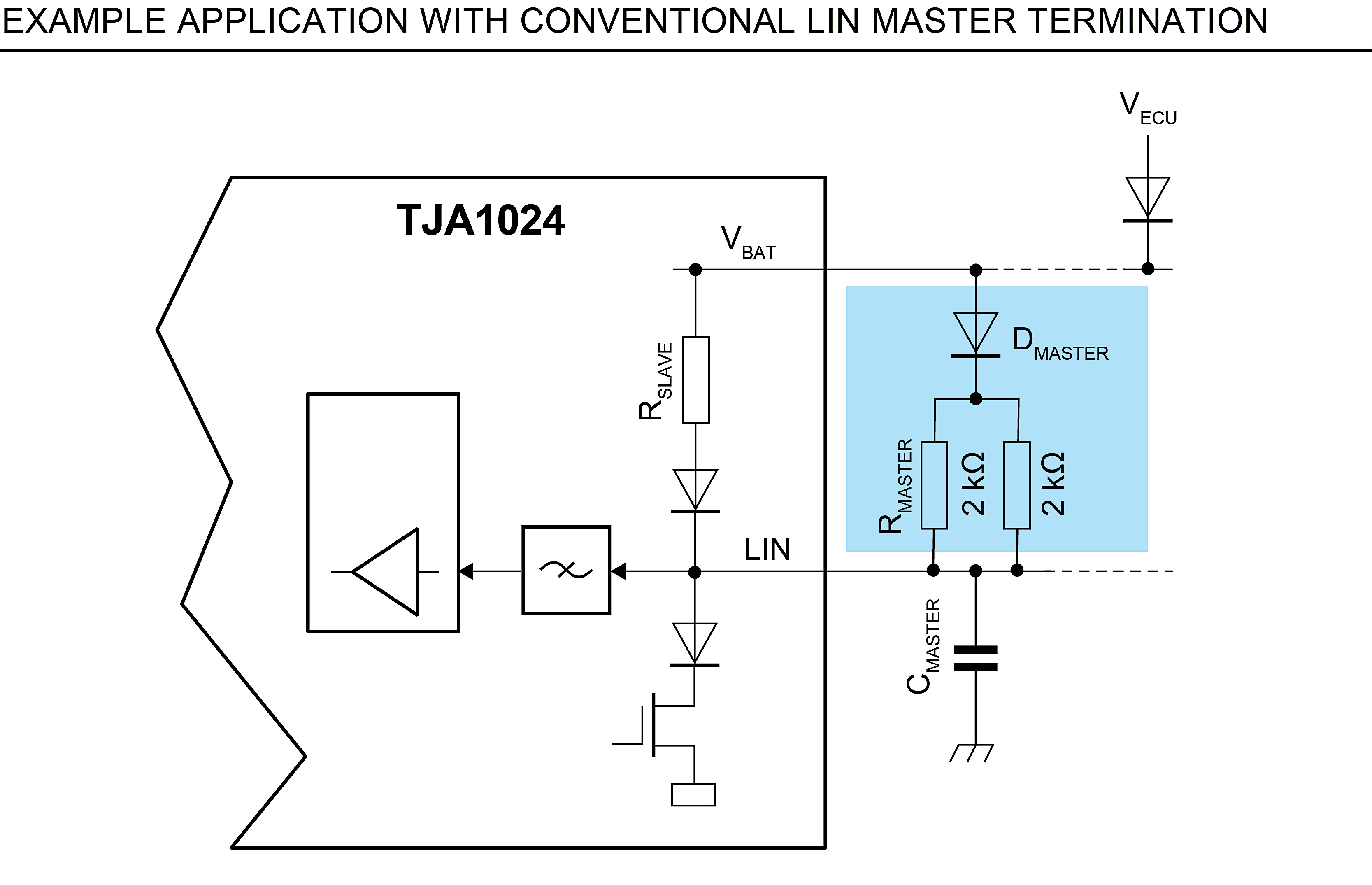
Exemple d’application avec une terminaison maître LIN conventionnelle.
Dans les applications avec plusieurs canaux maîtres LIN (par exemple 4 canaux LIN), l’espace carte consommé par la terminaison maître LIN peut devenir un facteur contraignant, en particulier lorsque la surface totale disponible sur la carte est déjà restreinte. Le cadre rouge de la Figure 5 montre l’espace de la carte de terminaison maître LIN pour 4 canaux maîtres LIN.
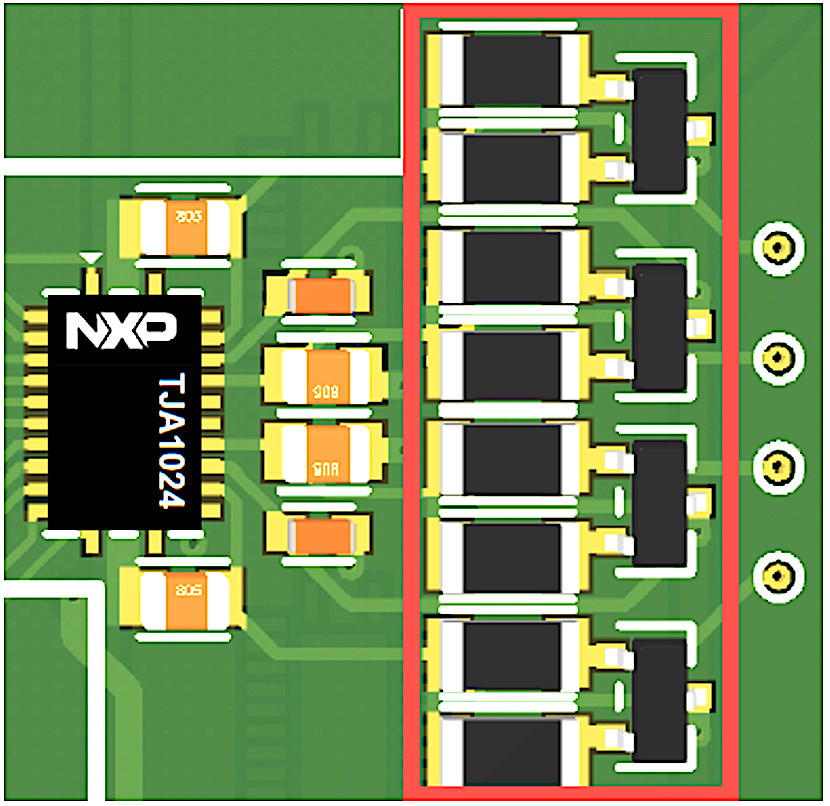
Figure 5 Exemple d’espace de carte de terminaison maître LIN avec 4 canaux maîtres LIN.
Les applications avec plusieurs canaux LIN sont généralement des applications maîtres LIN. Pour cette raison, l’intégration de la terminaison maître LIN dans l’émetteur-récepteur LIN est une étape logique pour les émetteurs-récepteurs à plusieurs canaux LIN.
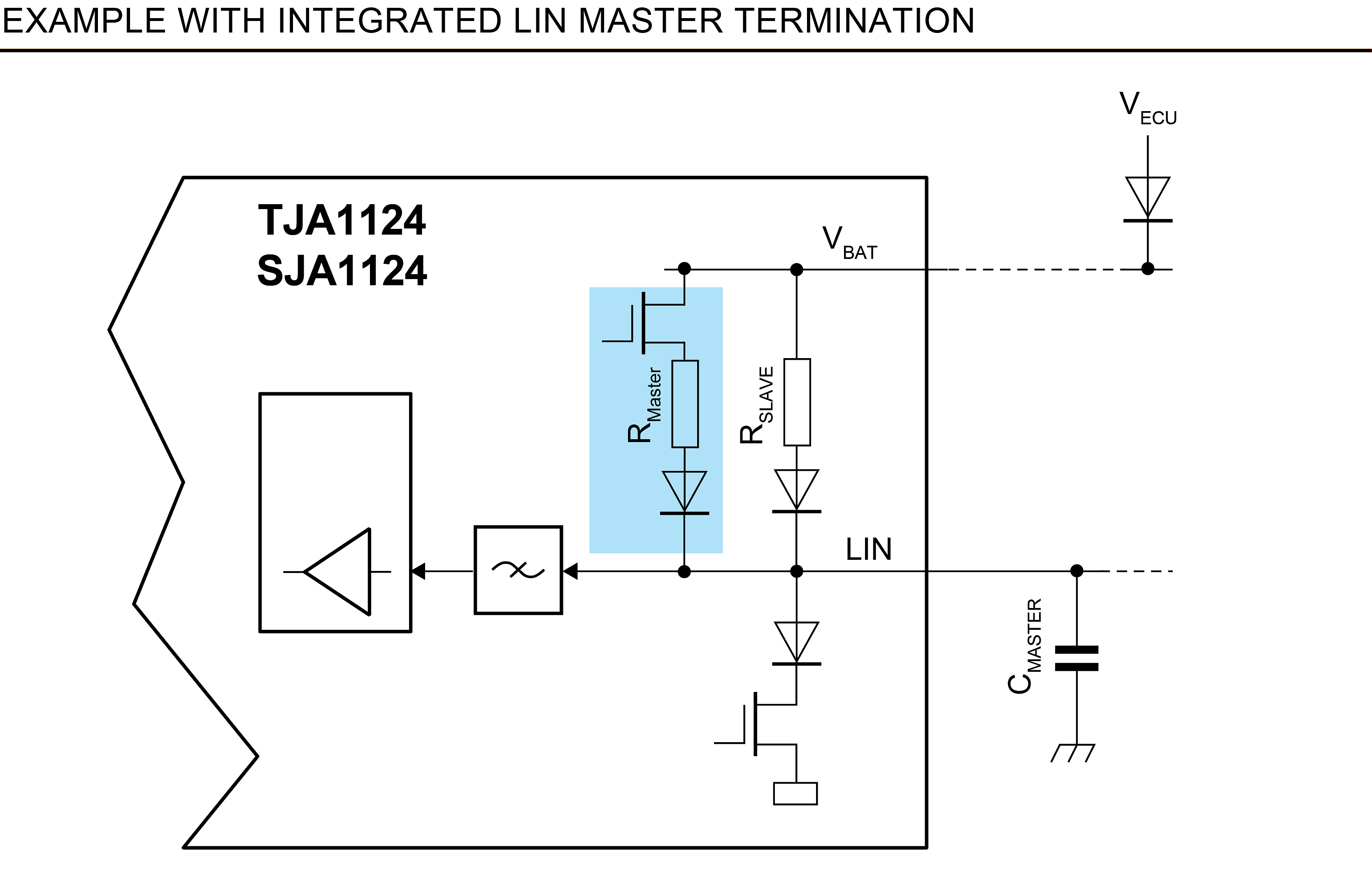
Figure 6 Exemple avec terminaison maître LIN intégrée.
Un interrupteur côté haut est ajouté au circuit de terminaison maître LIN intégré pour couper le courant de court-circuit à travers la résistance de rappel maître LIN pour les cas de défaut tels qu’un court-circuit LIN à la terre. La figure 6 montre un exemple dans lequel la terminaison maître LIN intégrée est mise en surbrillance.
Avec l’intégration de la terminaison maître LIN, l’espace de la carte liée au LIN pour les applications avec plusieurs canaux maîtres LIN (par exemple 4 canaux LIN) dépend principalement du nombre de canaux LIN par émetteur-récepteur LIN et du contour du boîtier de l’appareil. Ici, un boîtier sans plomb avec un plot exposé combine une petite taille avec une bonne connexion thermique à la carte. La figure 7 montre l’espace carte consommé par un émetteur-récepteur quadruple LIN avec terminaison maître LIN intégrée.
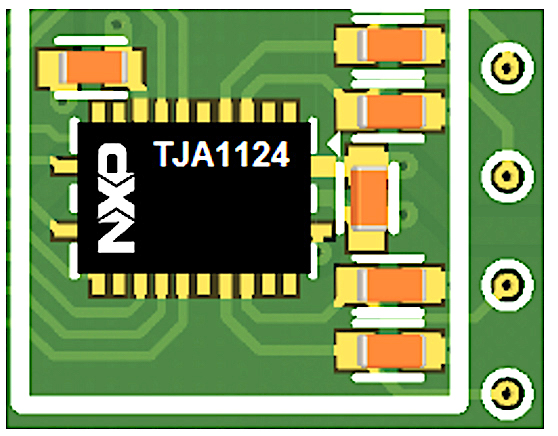
Figure 7 Exemple d’espace de carte avec 4 canaux maîtres LIN avec terminaison maître LIN intégrée.
Exemple d’application : Pont SPI vers Quad-LIN basé sur le SJA1124 de NXP
Un dispositif de pont SPI à LIN est disponible auprès de NXP. Le SJA1124 [1] est un dispositif de pont SPI-à-Quad-LIN incorporant 4 canaux LIN. Chaque canal maître LIN contient un contrôleur LIN et un émetteur-récepteur LIN avec terminaison maître. La communication de données LIN s’effectue via SPI. Le SJA1124 convertit le flux de données de transmission reçu sur l’entrée SPI en trames maîtres LIN sur le bus LIN. Le flux de données reçu sur le bus LIN peut être lu via SPI. Une trame LIN complète peut être transmise en une seule opération SPI.
Comme le montre l’exemple de la Figure 8, 8 canaux LIN peuvent être construits avec deux dispositifs SJA1124. Dans cette configuration, 5 broches MCU sont nécessaires pour la communication SPI (horloge, entrée de données, sortie de données, sélection de puce 1 et sélection de puce 2). Le générateur de débit en bauds intégré dans les contrôleurs LIN nécessite un signal d’horloge de référence. Pour la détection des événements d’interruption, une entrée MCU d’interruption externe partagée ou deux entrées MCU d’interruption externes dédiées peuvent être connectées en option à la sortie d’interruption du SJA1124, respectivement.
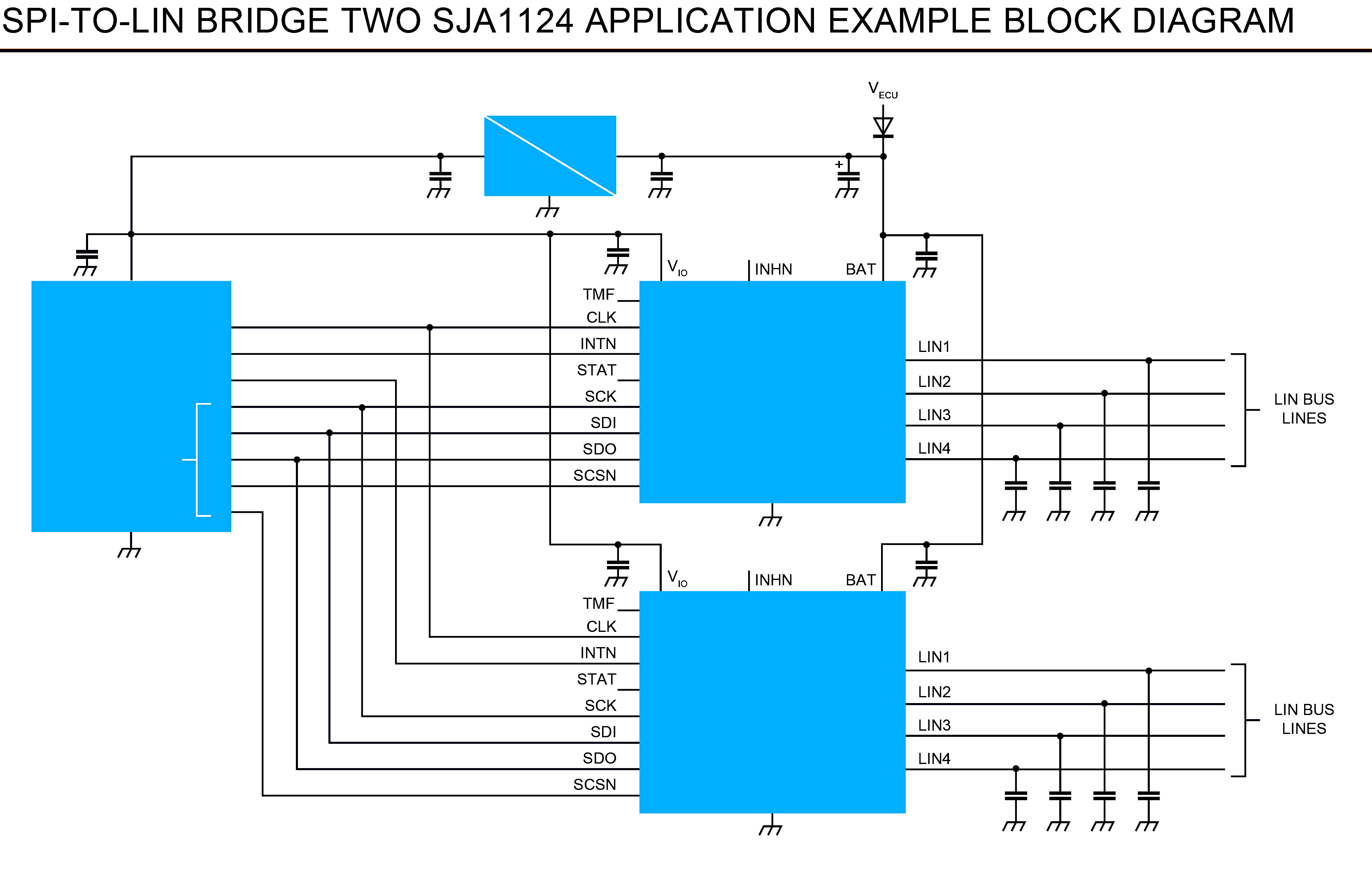
Exemple d’application de pont SPI à LIN avec 8 canaux LIN constitués de deux SJA1124 de NXP.
Figure 8 : Exemple d’application de pont SPI à LIN avec 8 canaux LIN constitués de deux SJA1124 de NXP
Grâce au transfert de données SPI et à la terminaison maître LIN intégrée du SJA1124, la nomenclature et l’espace carte peuvent être considérablement réduits. De plus, la gamme de microcontrôleurs adaptés est considérablement plus large.
Résumé/Conclusion
Avec l’introduction d’un pont SPI vers LIN avec terminaison maître LIN intégrée, la nomenclature, l’espace carte et les coûts des applications LIN multicanaux sont considérablement réduits :
- Composants moins discrets
- Moins de signaux d’interface MCU
Le découplage du MCU de l’interface LIN, en déplaçant le contrôleur LIN hors du MCU, offre une flexibilité sans précédent :
- Capacité d’adapter le choix du MCU aux principaux critères d’application
- Améliore l’évolutivité grâce à l’indépendance du MCU par rapport au nombre de canaux LIN
- Réutilisation rapide du pilote logiciel de pont SPI-to-LIN pour différentes implémentations de MCU
- Simplifie la reconception des conceptions héritées, si une connectivité LIN (plus) est requise
|
Semi-conducteurs NXP

Rainer Evers |
Ainsi, un pont SPI-to-LIN comme le SJA1124 de NXP est le dispositif compagnon idéal pour les microcontrôleurs afin de gérer un nombre élevé de canaux maîtres LIN, offrant des économies de coûts et d’espace carte sans précédent dans les applications LIN multicanaux.
![Solution de caméras séparées en prévision[5].png](https://www.graph-id.fr/wp-content/uploads/2021/08/Comment-les-cameras-stereoscopiques-peuvent-completer-le-lidar-pour-de-768x399.png)