Comment fonctionnent les systèmes de vision en robotique
Les systèmes de vision industrielle permettent aux robots d’identifier des objets, que ce soit pour le levage ou l’inspection.
Les systèmes de vision robotique sont communément appelés vision industrielle. Cet outil de vision est utilisé dans plusieurs processus industriels, notamment l’inspection des matériaux, la reconnaissance d’objets et la reconnaissance de formes. Chaque industrie applique ses valeurs particulières à la vision industrielle. Dans le domaine de la santé, la reconnaissance des formes est essentielle. Dans la production électronique, l’inspection des composants est importante. Dans le domaine bancaire, la reconnaissance des signatures, des caractères optiques et des devises est importante.
Sommaire
Les systèmes de vision robotique peuvent inclure :
- Technologie 1D mesurer la hauteur d’un objet se déplaçant le long d’un convoyeur ou lire des codes-barres.
- Scanners 2D peuvent lire les codes-barres 1D, mais ils peuvent également lire les codes-barres 2D et lire les codes-barres 1D bosselés ou froissés. Ceux-ci sont similaires à notre appareil photo de tous les jours. Ils peuvent reconnaître des formes.
- Technologie 3D peut prendre des mesures plus précises. Ils peuvent percevoir la profondeur ainsi que les formes.
- Capteurs de lumière structurés projeter de la lumière sur une pièce et analyser les dimensions des pièces en lisant la lumière.
- Caméras de temps de vol. Ces caméras utilisent la lumière infrarouge pour déterminer les informations de profondeur. Le capteur émet un signal lumineux qui frappe le sujet et retourne au capteur. Le temps qu’il faut pour rebondir est ensuite mesuré et fournit des capacités de cartographie de profondeur.
Nous avons discuté avec la société de vision industrielle Cognex pour comprendre comment les systèmes de vision fonctionnent avec la robotique. « Il existe deux applications principales pour le guidage des robots. Vous prenez une image de la scène et vous trouvez quelque chose et entrez les coordonnées de cette chose. C’est l’angle pour les systèmes 2D et 3D. Le robot peut voir un objet et en fera quelque chose », a déclaré Brian Benoit, directeur principal du marketing produit chez Cognex. Nouvelles de conception. « Une autre application inspecte un objet. Un robot tient une caméra et le robot déplace la caméra autour de la pièce pour obtenir certaines images.
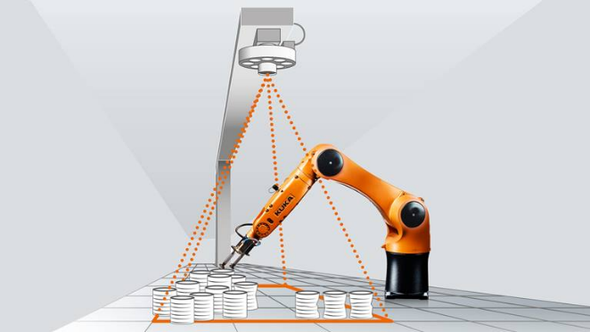
KUKA propose une solution de vision 2D flexible pour ses robots en s’intégrant au logiciel Cognex VisionPro. Les outils de vision localisent, inspectent et lisent les codes sur les pièces fixes ou mobiles.
Les robots varient en style
Pour Cognex, le système de vision est souvent confié à des intégrateurs qui bricolent des systèmes d’automatisation. « Parfois, notre client est un intégrateur qui construit un système avec des robots qui ont besoin de vision », a déclaré Benoit. « Les types de robots avec lesquels nous travaillons sont des robots manipulateurs. Ils peuvent soulever une grosse charge utile dans une cage. C’est rapide et dangereux d’être là.
Dans d’autres cas, le client est l’utilisateur final qui travaille avec des robots plus petits et plus sûrs : « Nous travaillons également avec des robots collaboratifs conçus pour fonctionner côte à côte avec des personnes. Ils n’utiliseront pas autant de force », a déclaré Benoit. « Ils font souvent du pick-and-place. » Il a noté que les systèmes de vision de Cognex ne sont pas les mêmes que les systèmes guidés utilisés par les robots mobiles. « Nous n’avons pas vu beaucoup de traction avec la vision sur les robots d’entrepôt. Ils utilisent des capteurs intégrés à leur système, ils n’ont donc pas besoin d’une caméra extérieure.
Alors que les grands robots en cage ont une histoire de plusieurs décennies, les robots collaboratifs sont un ajout relativement nouveau au monde de l’automatisation. « Le marché des robots cages est stable. Le client le plus courant est dans l’automobile. Le besoin d’un système de vision avec des robots en cage n’est pas grand car il n’y a pas autant de variabilité », a déclaré Benoit « Avec les robots collaboratifs, vous avez un environnement plus non structuré, donc il y a beaucoup plus d’applications de vision. C’est un marché en développement, notre stratégie est donc de bien travailler avec n’importe quel fabricant de robots. Nous développons des interfaces logicielles pour le fabricant de robots afin qu’ils puissent facilement travailler avec notre système. Avec chaque robot, nous devons développer une interface.

ABB Integrated Vision s’interface avec Cognex.
Les robots voient dans le cerveau logiciel
L’œil humain est un capteur. C’est notre cerveau qui comprend le flux visuel de nos yeux. Idem avec les robots. Le logiciel du robot interprète les données visuelles. « Le logiciel est le cerveau derrière tout. Nous avons deux types de vision. Un ensemble d’algorithmes est basé sur des règles. Il recherche des motifs et des bords. L’autre algorithme se trouve dans l’espace d’apprentissage en profondeur où le logiciel est formé par exemple. Nous voyons de la traction dans les deux », a déclaré Benoit. « L’objectif du logiciel est une bonne poignée de main entre le robot et le système de vision. Nous formons le robot et le système de vision pour savoir où ils se trouvent ensemble. Lorsque la caméra voit quelque chose, le robot sait où aller en réponse.
Le logiciel de vision comprend une connexion plug-and-play pour chaque fabricant de robots. « Nous essayons de rendre l’intégration aussi simple que possible. Nous avons les bons crochets dans notre logiciel pour envoyer des signaux dans les deux sens », a déclaré Benoit. Nous comptons également sur les intégrateurs pour nous aider à ce sujet. Nous travaillons directement avec certaines entreprises de robots, comme Universal Robots. Ils disposent d’un logiciel de vision maintenu par Cognex et fonctionnant directement sur leurs robots.
Une partie de ce qui distingue les robots collaboratifs des robots traditionnels en cage est qu’ils sont conçus pour être formés par les utilisateurs plutôt que programmés par des intégrateurs. « Le modèle économique d’Universal Robot consiste à ignorer les intégrateurs. Ils ont un pilote pointer-cliquer », a déclaré Benoit. « Il est important que lorsqu’ils travaillent avec des périphériques, ils puissent simplement les brancher. Ils le font avec notre système de vision et avec différents effecteurs finaux. »
Mettre le robot à vision améliorée au travail
Le système de vision qui permet au robot d’identifier une pièce et de la récupérer n’est pas différent du système de vision qui permet au robot de vérifier pour faire un contrôle qualité sur une pièce. « Lorsque le robot dispose d’un système de vision – que ce soit sur un convoyeur ou à l’extrémité d’un bras de robot – cela fonctionne de la même manière. Le système de vision est monté sur un bras robotisé, et le bras se déplace », a déclaré Benoit. « Le logiciel analyse le flux de la vision. Dans de nombreux cas, le logiciel s’engage dans un apprentissage en profondeur. Nous avons intégré un système, toute l’analyse existe à l’intérieur de la plateforme de vision. Nous utilisons un réseau de neurones à l’intérieur de la caméra.
Le logiciel du système de vision peut être programmé pour identifier un objet spécifique, ou il peut être conçu pour apprendre ce qu’il voit. « Le deep-gain est différent de la programmation conventionnelle. C’est comme apprendre à un enfant ce qu’est une maison. Normalement, vous ne dites pas à l’enfant les coordonnées d’une maison. Vous dites. « C’est une maison, c’est une maison et c’est un immeuble de bureaux. » Notre logiciel est conçu pour le faire dans la fabrication.